



紗筒搬運機器人怎么用?青島賽邦智能技術人員設計開發紗筒搬運機器人,采用6自由度關節型機器人,設計具有雙內撐式抓取機構和推紗機構的末端執行器,實現單次抓取2個筒紗,降低了工人的勞動強度,提高了紗筒搬運工作效率和紡織裝備的自動化水平。今天小編就帶大家一起來了解一下紗筒搬運機器人怎么用?

紗筒搬運機器人使用前注意事項:
(1)紗管為紙質或高分子材質,內表面中空且不光滑。筒紗的質量直接影響后道紡織工序的加工生產,并最終影響紡織品的質量。
(2)在紗筒搬運過程中,紗筒表面的纖維不能受到污染和破壞,紗線的卷繞密度不能降低, 紗線結構不能破壞。
(3)加工好的紗筒,主要通過人工搬運進行收集、轉運,將其放置在包裝機上或紗架上,為后續工序做準備。
紗筒搬運機器人怎么用:
多工種智能復合機器人上下料及智能運輸系統: 包括加捻區和織布區,所述加捻區內放置有加捻機,所述織布區內放置有紗架;還包括agv小車,所述agv小車上設置有協作機器人,所述agv小車上還放置有用于承載股紗筒的棧板。
協作機器人通過其自身的控制系統能夠將股紗筒從加捻機上取下并放置在agv小車上,然后由agv小車將股紗筒輸送至紗架旁,再由協作機器人將股紗筒安裝至紗架上,同時放料完成的股紗筒可由協作機器人從紗架上取下。通過agv小車實現智能運輸,協作機器人實現自動上下料,有利于減小操作工人的勞動強度。
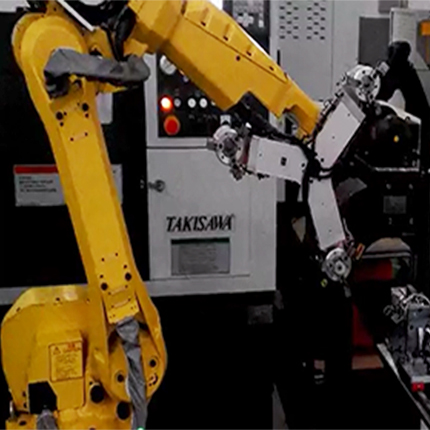
紗筒搬運機器人以固定工作站的形式,主要由待搬運的紗筒、機器人和紗架構成。待搬運的 紗筒隨機或整齊地擺放在機器人作業空間范圍內,紗架為多層的空間結構,均勻安裝有紗桿 用于懸掛紗筒,機器人本體上安裝有專用的末端執行器,可以單次抓取2個待搬運的紗筒,再按設定好的路徑將紗筒放置在紗架的紗桿上,完成搬運作業。
青島賽邦智能技術人員會根據紗筒的結構特征及人工搬運紗筒的作業特點,在分析企業的工作環境、紗架的位置等因素的基礎上,為客戶量身定制紗筒搬運機器人。


